Back to List
Autonomous Fly-by Guidance and Navigation
本研究は,深宇宙探査機のフライバイ誘導航法の自律化を目指すものである.探査機の有する情報及び探査機の少ない計算資源のみを用いて誘導航法を行えるフライバイアルゴリズムを検討することにより,地球との通信を必要とする現状の深宇宙探査機の軌道制御則よりもロバストなシステムを実現することを目指す.
This research aims to develop an autonomous flyby guidance and navigation system for deep-space probes. By considering a fly-by algorithm that can perform the guidance and navigation using only the information possessed by the spacecraft and its limited computational resources, we aim to realize a more robust system than the current orbit control laws for deep space probes, which require communication with the earth.
Abstract
深宇宙においてフライバイの誘導航法を行う際には,探査機の観測データに基づいて地上のコンピュータが誘導航法計算を行い,その結果に基づいて探査機が軌道制御を実施するという誘導航法方式が用いられている.この方式においては探査機と地球との通信が不可欠だが通信時間が非常に長くなるため,各時刻の探査機の状態に基づく逐次的な制御ができないという課題や,フライバイ直前の地上管制側の負担が非常に大きくなるという問題が生じる.そのため,現在の誘導航法システムの運用面でのロバスト性は非常に低い.その中で,探査機が地球と通信することなく自律的に誘導航法を行うことができれば,探査機は各時刻の状態に基づいて軌道制御を実施できるようになり,さらには地上管制側の負担も軽減されるため,深宇宙探査の実現性は向上する.
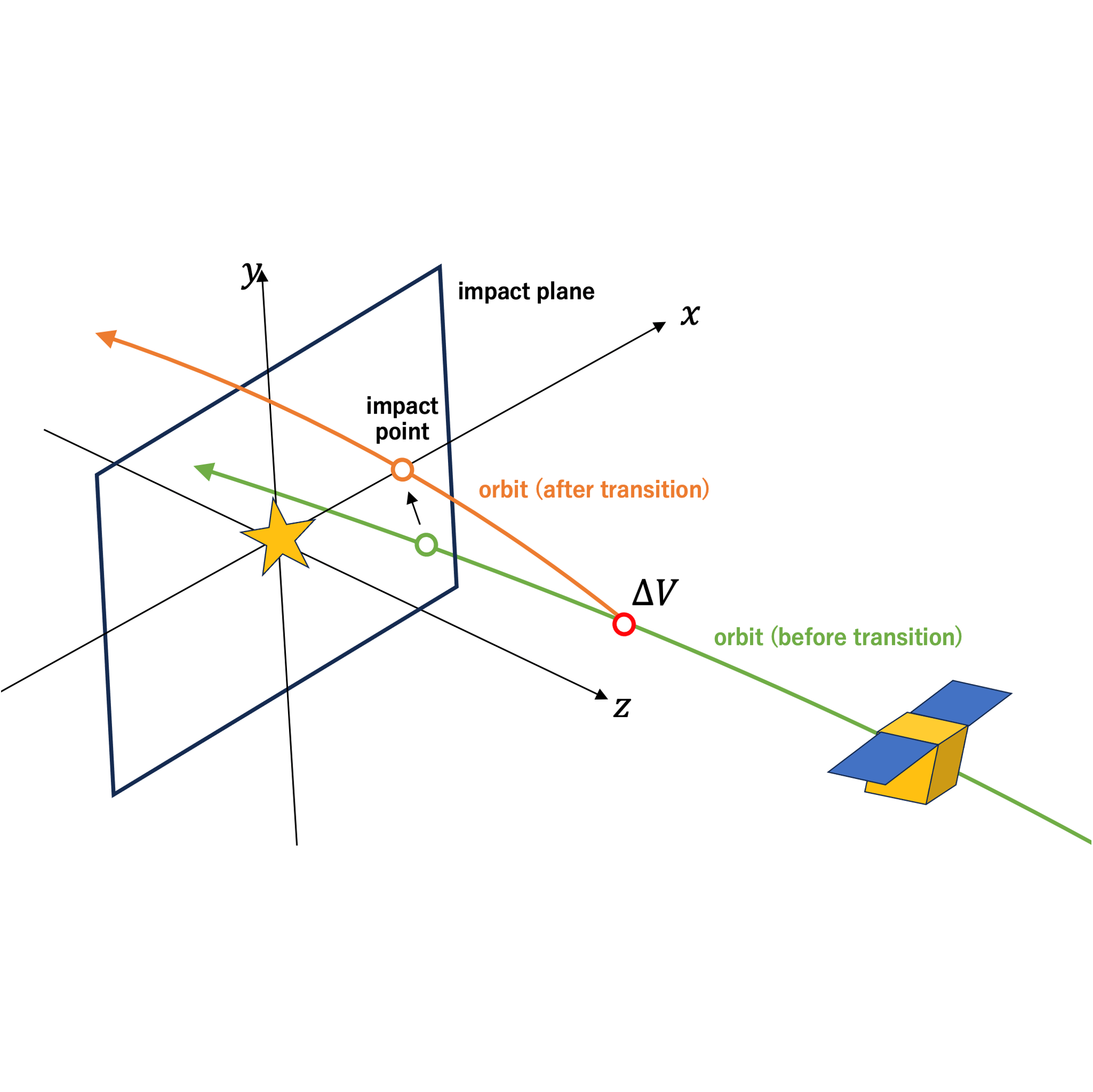
探査機の誘導航法を自律化するためには、探査機の有する情報及び探査機の少ない計算資源のみを用いて誘導航法を行えるアルゴリズムが必要となる。また,目標天体に対する探査機の相対速度が高速である点などのフライバイの特性も考慮する必要がある.本研究では、探査機に搭載されたコンピュータにて逐次的な計算を行うアルゴリズムを用いた誘導航法則について検討を行っている.また,探査機自身が観測データに基づいて自己位置や到達位置を推定するための力学モデルについての検討も行っている.これらの検討により,深宇宙探査機のフライバイを行う際に適用可能な誘導航法システムを構築することを目指している.
Guided navigation for flybys in deep space uses a guided navigation method in which a computer on the ground performs guided navigation calculations based on observation data from the spacecraft, and the spacecraft performs orbit control based on the results of the calculations. In this method, communication between the spacecraft and the earth is essential, but the communication time is extremely long, making it impossible to perform sequential control based on the spacecraft's status at each time, and placing an extremely large burden on the ground control side just prior to the flyby. The operational robustness of the current guidance and navigation system is therefore very low. In this context, if a spacecraft can autonomously perform guided navigation without communicating with the earth, the spacecraft will be able to perform orbit control based on the state of the spacecraft at each time, and the burden on the ground control side will also be reduced, thus improving the feasibility of deep space exploration.
In order to make the guidance and navigation of a spacecraft autonomous, an algorithm that can perform the guidance and navigation using only the information possessed by the spacecraft and the spacecraft's limited computational resources is required. It is also necessary to take into account the characteristics of the flyby, such as the high relative velocity of the spacecraft with respect to the target object. This study examines a guided navigation law using an algorithm that performs sequential calculations on the spacecraft's onboard computer. We are also studying a dynamic model for the spacecraft to estimate its own position and arrival position based on observation data. Through these studies, we aim to develop a guidance and navigation system that can be applied to deep-spacecraft flybys.