Back to List
Dynamics Analysis of Throw-and-Catch Sample Transfer
深宇宙におけるランデブードッキングにおいて,ターゲットが遠方にある場合の相対航法誘導手法を確立することを目的としている.本研究では,ターゲットが発するビーコンの到来方向を推定することで,ターゲットの相対軌道を推定することを目指している.
The objective of this study is to establish a relative navigation guidance method for rendezvous docking in deep space when the target is far away. This research aims to estimate the relative orbit of the target by estimating the direction of arrival of the beacon emitted by the target.
Abstract
深宇宙サンプルリターンミッションでは,着陸機と輸送機の使用が考えられている.このようなミッションでは,取得したサンプルを着陸船から輸送機へ輸送する技術が必要となる.
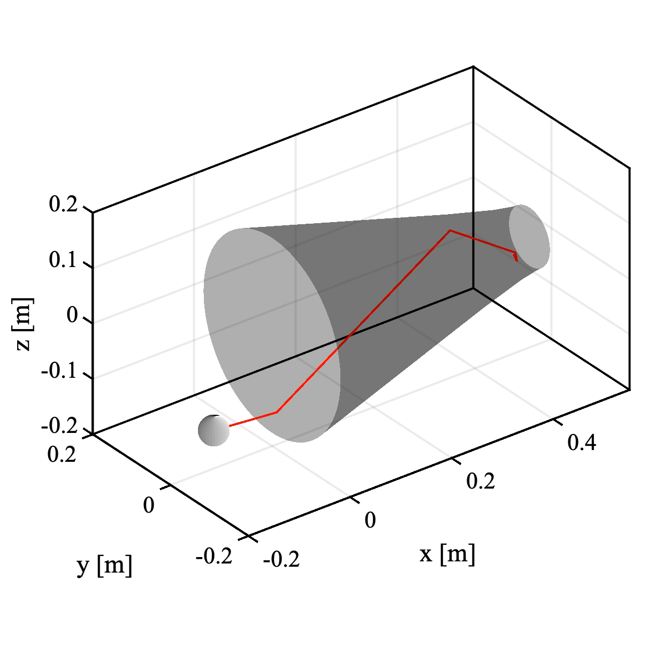
本研究では,サンプル輸送方法としてスローアンドキャッチ法を検討する.この方式では,輸送機はホーンウォールを持ち,キャッチャー部に電磁石を装備している.着陸機はサンプルコンテナ(SC)を搬送機に投げ渡す.SCはホーンウォールによって誘導され,最終的に電磁石によってキャッチされることが期待される.しかし,このスロー&キャッチ方式は実績がなく,実現可能かどうかは未知数である.
本研究では,スローアンドキャッチ方式の実現可能性を検討する.ホーン壁面の解析には,動力学解析から得られた角度関係を用いる.
For deep space sample return missions, the use of landers and a transfer vehicle is considered. In such a mission, a technique for transporting the acquired samples from the landers to the transfer vehicle is required.
This research investigates a throw-and-catch method as a sample transporting method. In this method, the transfer vehicle has a horn wall and equips an electromagnet in the catcher part. The landers throw over the sample container (SC) to the transfer vehicle. The SC is expected to be guided by the horn wall and finally caught by the electromagnet. However, this throw-and-catch method has no proven track record, so whether this method is feasible is not known yet.
In this research, the feasibility of the throw-and-catch method is investigated. For the analysis of the horn wall, an angular relationship derived from a dynamics analysis is used.