Back to List
Touch-and-Go Sampling Probe
本研究は,宇宙科学のフロンティアである超遠方の小~中サイズの天体を対象とし,天体表面への複数回の自在な離着陸を実現するための技術を目指したものである.特に,これまで深宇宙ミッションでは着目されてこなかった固体モーターを活用し,推進系技術・誘導航法制御技術の観点から,簡素かつ自由度の高い天体アクセス手段を実現することを目的としたものである.
This research aims to develop a technology to realize multiple free takeoffs and landings on the surface of very distant small to medium-sized celestial objects, which are the frontier of space science. In particular, this research aims to realize a simple and flexible means of accessing celestial bodies from the viewpoint of propulsion system technology and guidance and navigation control technology by utilizing solid motors, which have not been focused on in deep space missions so far.
Abstract
はやぶさやはやぶさ2では,対象となる小天体からサンプルを採取し,再突入カプセルによって地球へ帰還させるという重要なタスクが課されていた.これは宇宙工学の観点から非常な大きな成果となる一方で,打ち上げ以降は直接的な処置を施すことができないという技術的な困難も存在する.リスクマネジメントの観点からみると,宇宙機を地球へ帰還させることが最優先であるため,サンプル回収のためのタッチダウンを行う際は事前に様々な危険性を考慮する必要がある.例えば,はやぶさ2では,探査機自身が小惑星天体リュウグウ(1999JU3)にタッチダウンを行うミッションであった.そのため,重大なリスクの一つにタッチダウンによる探査機の故障が考えられる.また,はやぶさ2ではリュウグウに複数回のタッチダウンを行ったため,2回目以降ではタッチダウンによるサンプルの損失もリスクとしてあげられる.そのため,新しいサンプルリターンミッションでは,これらのリスクを回避するようなミッション/システム設計にする必要がある.多種多様な探査方法の確立は,対象天体の選択の自由度や運用の自在性に寄与するため,将来の深宇宙探査ミッションの実現可能性を広げることに繋がる.
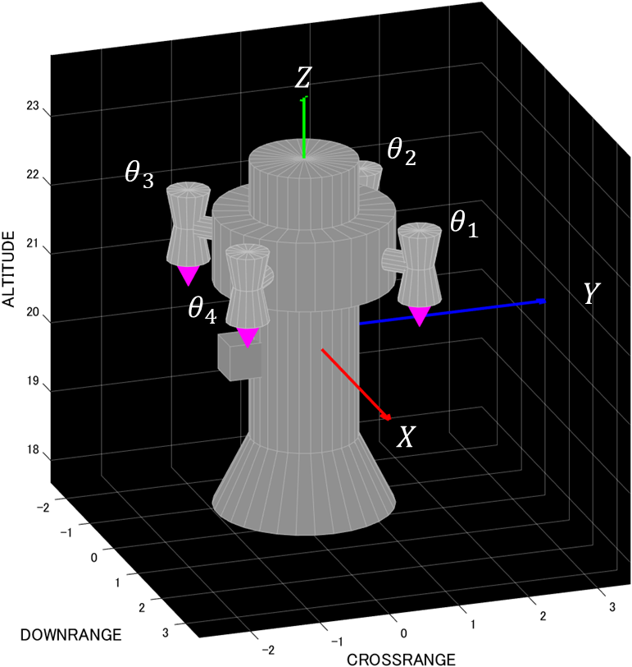
本研究では,次世代型のサンプリングリターンミッションに対し,サンプリングを行う小型探査体のシステム的な考察と制御手法の検討を行う.これに対し,設計特性の観点からみた挙動に関する考察を行う.また,プローブに対する有効な制御手法を検討し,数値シミュレーションを用いて,これの有用性を確認する.
Hayabusa and Hayabusa2 were tasked with the important task of collecting samples from small objects and returning them to Earth by re-entry capsule. While this is a very significant accomplishment from the perspective of space engineering, it also presents technical difficulties in that no direct measures can be taken after launch. From a risk management perspective, the top priority is to return the spacecraft to Earth, so various risks must be considered in advance when performing touchdowns for sample recovery. For example, Hayabusa2 was a mission in which the spacecraft itself touched down on the asteroid Ryuguu (1999JU3). Therefore, one of the major risks is the failure of the spacecraft due to touchdown. Hayabusa2 also performed multiple touchdowns on Ryuguu, so the loss of samples due to touchdowns after the second touchdown is also a risk. Therefore, the new sample return mission should be designed to avoid these risks. The establishment of a wide variety of exploration methods contributes to the freedom of target object selection and operation, and thus expands the feasibility of future deep space exploration missions.
In this study, we examine system considerations and control methods for a small spacecraft that will perform sampling for a next-generation sampling return mission. The behavior of the probe from the viewpoint of design characteristics will be discussed. We also investigate effective control methods for the probe and confirm their usefulness using numerical simulations.
